天空之眼|长航时FPV为何成为飞手进阶的终极梦想|穿越机厂家|翼飞智能
在无人机技术日新月异的今天,FPV(第一人称视角)飞行早已不再是小众爱好。当你戴上 goggles,透过那小小的屏幕感受速度与自由时,你能在空中停留多久?这往往是区分新手与老手、娱乐与专业的关键指标之一。长航时FPV,这个听起来就带着技术密度的概念,正悄然改变着无数飞手的飞行哲学与实践路径。它不仅关乎电池的容量,更关乎悬停与巡航的平衡、动力系统的效率,以及信号传输的可靠性。本文将带你深入探究长航时FPV背后的技术逻辑、应用场景与未来的无限可能,为你打开一扇通往更广阔天空的大门。
传统FPV多以短时高机动性为主,追求的是瞬间的爆发力与感官刺激。然而,随着航拍、测绘、巡检等实用需求的涌现,飞手们开始追问:我们能否在空中飞得更久?答案便是长航时FPV。这个技术方向的核心在于:在保证稳定视频传输与操控的前提下,将单次飞行时间从普通的5-10分钟延长至20分钟、30分钟甚至更久。这并非简单堆叠电池,而是对整机减重、空气动力学设计、电机效率、电调优化以及电池能量密度的系统性考验。一个真正成熟的长航时FPV方案,往往凝聚着开发者无数次的迭代与试错,它代表着对天际线的征服欲,从“飞一会儿”升级为“飞尽兴”。
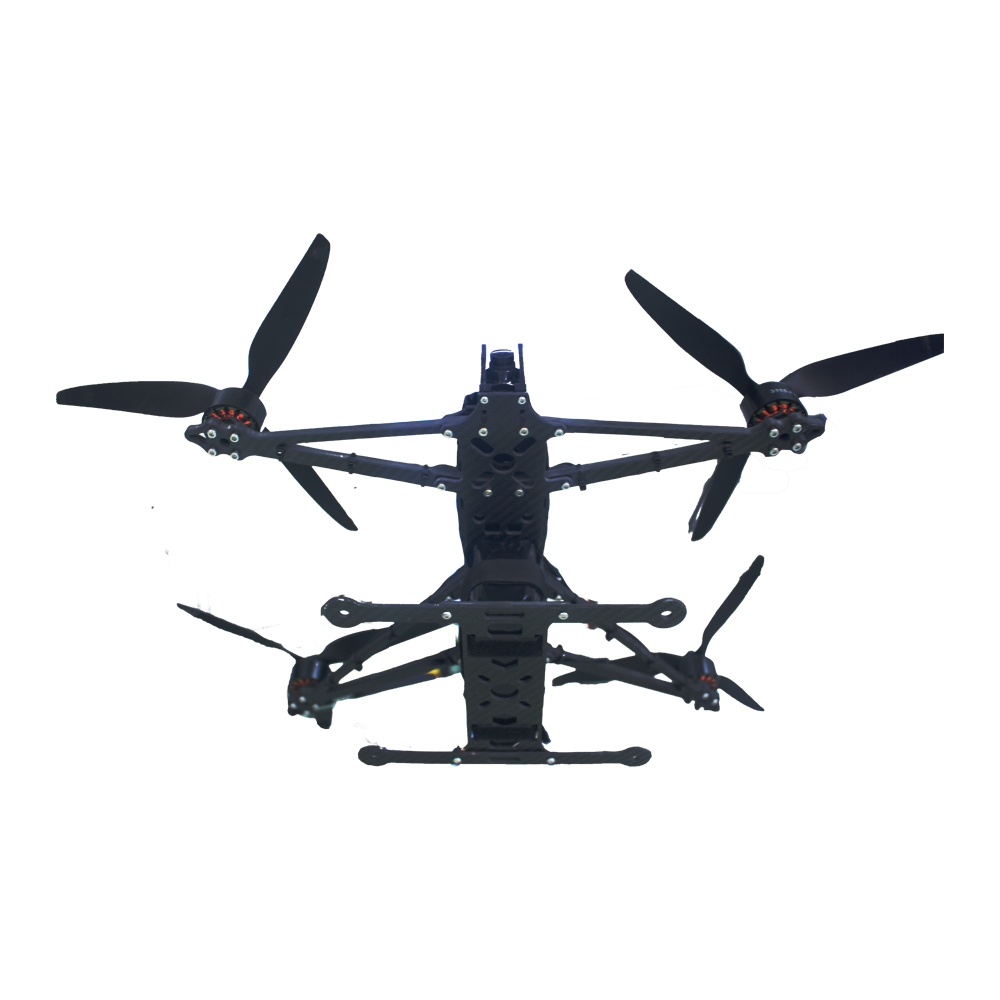
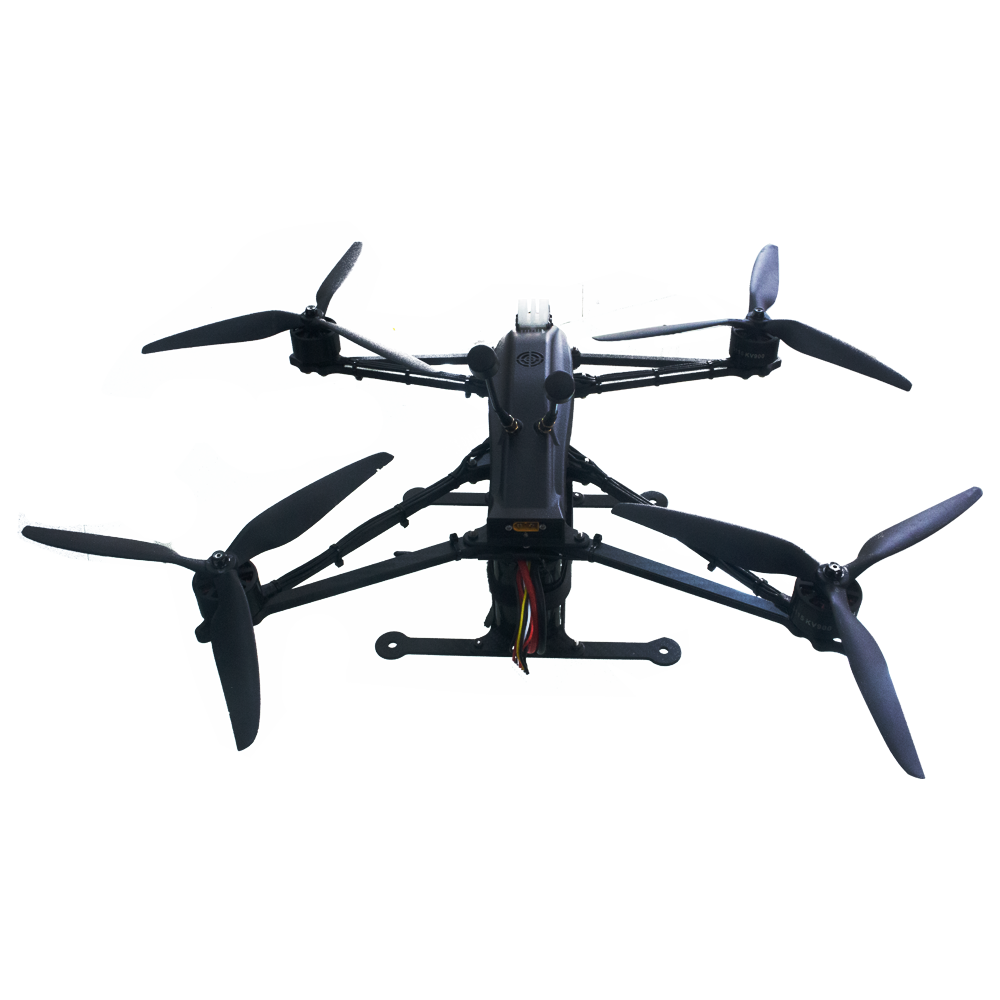
要理解长航时FPV的魅力,就必须先拆解它的三大技术支柱。首先是动力系统的效率革命。传统的2205、2306等电机惯于高转速爆发但在低油门巡航时效率欠佳。长航时方案倾向于使用大尺寸慢速电机,例如2804或更夸张的3508,搭配大尺寸三叶或四叶螺旋桨。这种组合能有效降低旋转气流产生的诱导阻力,使整机像一只展翅的鹰一样在空气中平顺滑行。同时,高效的电调(如BLHeli_32)能精准控制相位,减少不必要的发热损耗。许多资深玩家会选择将原厂3S电池升级为4S甚至6S高压电池,提高电压区段从而降低电流,进一步延长放电平台。
其次,机架与飞控的“轻量化哲学”是长航时FPV的另一核心。传统竞速机架为了强度不惜使用厚实的碳纤维,而长航时机架则往往在保证结构刚度的前提下大量采用镂空设计、开口面积更大,甚至部分使用3D打印的尼龙或PC结构件。飞控的选择也至关重要,如Matek F765系列或更专业的CubePilot系列,它们集成了高精度气压计与GPS/GNSS模块,能够提供稳定的位置锁定与返航逻辑。当长航时FPV在荒野或高空作业时,一次稳定的失控返航可能就意味着数万元的设备免于坠毁。此时,飞控的冗余设计与智能电源管理是飞行安全的最后一道防线。
当然,光有硬件的堆积远远不够,软件的调校同样决定了长航时FPV的实际续航表现。开源飞控固件如ArduPilot或iNav已经成为许多长航时飞手的不二之选。通过开启“自动巡航”模式或“航点飞行”功能,飞手可以规划出最经济的航线,让飞机逆风加速、顺风减速,并利用大气数据估算滞空时间。更重要的是,这些固件支持动态调整PWM(脉冲宽度调制)输出率与滤波参数,在悬停与横风环境下自动补偿,避免了飞手因手动操控不当而浪费电能。此外,精准的电压电流计能实时回传能耗数据,并在地面站软件的OSD(屏幕显示)上标出剩余飞行时间,让你的每一次拉距飞行都心中有数。
然而,长航时FPV并非仅仅为了满足“飞得久”的虚荣心,它在实际应用中展现出的价值同样令人惊叹。在农作业植保领域,搭载多光谱相机的长航时FPV可以持续滞空20分钟以上,完成对整片麦田的长势评估与病虫害监测。在桥梁与电力巡检中,由于无需频繁更换电池,操作员可以一气呵成地完成数十座铁塔的磁漏检测或裂缝识别。更有趣的是,在影视航拍行业,长航时FPV让导演获得了前所未有的创作自由——飞机可以安静地在高空盘旋等待光线变化的“魔法时刻”,而非因电池警报而匆忙降落。这些场景的成功,核心都归功于长航时FPV提供了充裕的时间冗余,让拍摄者不必在时间与画面之间做出痛苦的权衡。
当然,实现真正的长航时FPV并非一蹴而就,无数陷阱与误区等待着探索者。最经典的错误便是盲目追求大容量的电池。例如将5000mAh 6S LiPo安装在传统5寸机架上,不仅因电池过重导致悬停电流极大、续航反而缩短,更可能影响重心位置,形成不稳定的“点头”现象。真正的高效方案往往采用并联两块中小容量电池的方式,或者选择能量密度更高的Li-Ion电芯(如18650或21700)组成自制的圆柱电池组。此外,天线系统的轻量化也不可忽视:笨重的SMA接头与宽大的全向天线会产生不小的风阻。许多资深玩家会为此更换轻量的MMCX接头以及高增益的小型平板天线以减小飞行阻力。
在信号传输方面,长航时FPV对图传与遥控链路提出了更高要求。飞行时长的增加意味着操纵距离往往更远,可能达到2公里甚至5公里以上。为此,传统的2.4GHz遥控与5.8GHz图传组合容易出现阻塞。成熟的方案转向使用915MHz的ELRS(ExpressLRS)遥控系统,搭配1.2GHz或800MHz的低频图传。较低频率的电磁波在绕射能力与穿透性上更具优势,在复杂地貌下也能保持清晰画质与操控响应。更激进的玩家甚至开始尝试数字图传系统(如DJI FPV System或HDZero),它们通过H.264/H.265编码在有限带宽内提供高清画质,虽然延迟略高,但对于长航时航拍而言,流畅的画面往往是换取时间的最佳代价。
案例是最具说服力的教材。一位网名为“SkyNomad”的海外玩家改造了一台采用5.5英寸桨、搭载万向云台与GoPro 11的定制机,得益于一架采用2P 6S 11000mAh Li-Ion电池组与Matek H743飞控的组合,实现了连续31分钟的滞空记录,并飞越了北美某片针叶林地带完成气象采样。另一个国内案例则来自四川的一位飞手,他在高海拔地区利用长航时FPV进行雪崩风险区调查。飞机搭载热成像仪,在-10°C的低温下以8m/s巡航空速飞行了25分钟,成功绘制出危险区域图。这些实践共同证实:当长航时FPV结合可靠的电池管理系统与科学的航线规划后,它就不再只是玩具,而是能够切实产生社会价值的空中平台。
值得强调的是,长航时FPV的进化之路与开源社群及厂商的推动密不可分。近年来,诸如大疆在数字图传上推广的“O3 Air Unit”系列,以及T-Motor在电机产品线中专为续航优化而打造的“LONG-RUN”系列,都从硬件层面降低了长航时FPV的入门门槛。与此同时,国内的B站、5iMX论坛以及国外的ArduPilot社区涌现出一批又一批详尽的教程,包含如何计算最小电池需求、优化PID中的P值以获得更稳定悬停,甚至如何利用太阳能板在特定飞行高度进行辅助充电。正是这种开放共享的精神,使得越来越多飞手敢于挑战更远的距离与更长的时间。
展望未来,长航时FPV或将与AI边缘计算产生深刻的化学反应。想象一下,当一架FPV凭借高效动力在空中飞行1小时,它可以通过机载的微型处理器(如Jetson Nano或Raspberry Pi 4)实时识别野外的建筑、火灾或者目标人物,并将结果通过4G或LoRa链路回传至指挥中心。此时,无人机不再是单纯的“眼睛”,更是能思考的“大脑”。此外,氢燃料电池技术在航空领域的成熟也可能彻底打破电池重量限制。部分实验室已率先测试了100W级氢燃料电池用于无人机,比锂电池轻70%而能提供更长的飞行时间。届时,长航时FPV将真正实现“飞两小时,拍半小时”的实用化目标,开启空中全时巡游的新纪元。
这篇文章的最后,我希望每位对长航时FPV感兴趣的朋友都能保持务实与敬畏之心。追求续航并非意味着牺牲安全;相反,每一次飞得更高更远的同时,都要反复检查核心组件——优化飞控的失效保护、拧紧每一颗螺丝、选用可靠的固件配置。真正的飞行乐趣,从来不仅仅是续航数字的突破,更是与天空互动的质量与深度。希望你的长航时FPV经历同样精彩,无论飞向旷野,还是穿过云层,都永远记得安全是飞行的第一基准。在未来的某一天,当你的飞机安然降落在起点,而屏幕上的剩余航时显示“5分钟”时,那种从容与成就感,将是你所有努力的最好注脚。